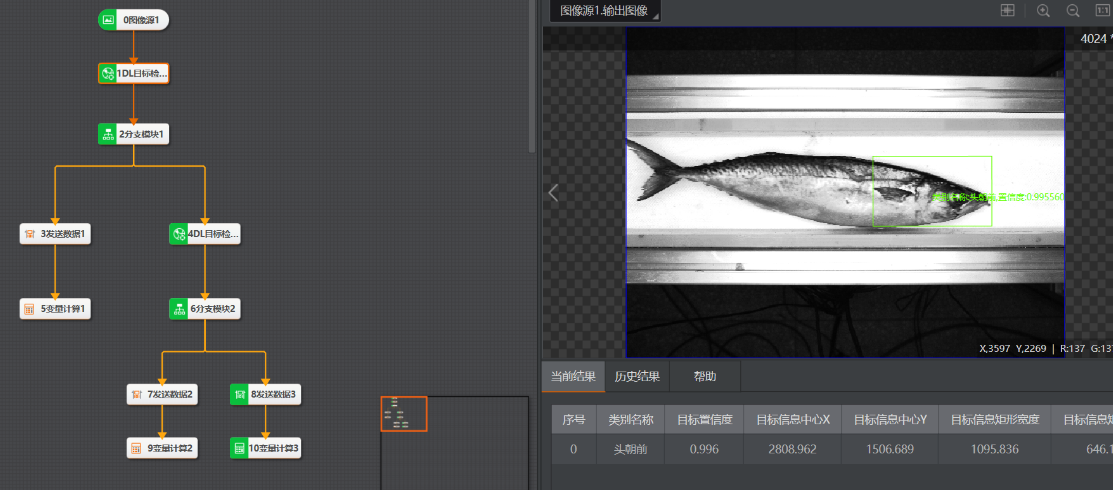
Förarbandet stannar inte, dynamisk identifiering av fiskens huvud- och svansriktning, fiskens bakriktning.
Dela
一. Projektbakgrund:
Kravsbeskrivning:
1. transportbandet inte stannar, dynamisk identifiering av fiskens huvud- och svansriktning, fiskens bakriktning.
2. klassificera föremål och välja om de ska kasseras.
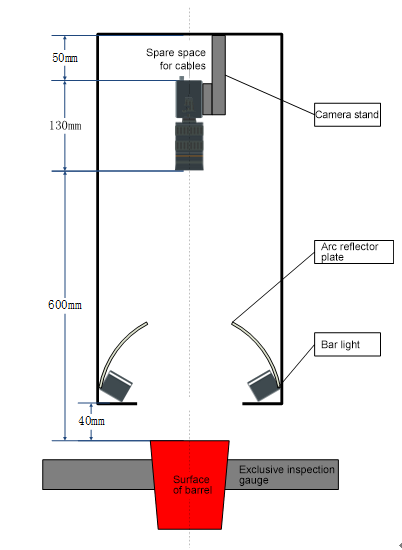
3. transportband + fotoelektrisk sensormekanism.
Projektets svårigheter och lösningar:
Ett stort antal bilder, mycket djup träning.
iI. Lösningsarkitektur:
fördelar med programmet:
1. mjukvara och hårdvara säljs tillsammans (visionmaster + visiontrain).
2. efter en månads genomförande skall VM snabbt tillämpas.
3. resultatets noggrannhet är 97% och kundnöjdheten är hög.