
รถบรรทุกจะขนพัสดุเต็มพัลเลตไปยังพื้นที่การ卸载 และหลังจากการ卸载โดยรถยกมันจะขนโดยตรงไปยังสถานีการควบคุม 3 มิติเพื่อการจัดเรียงและถอด หลังจากเสร็จสิ้น AGV จะใช้ในการร่วมมือกับการขนส่งไปยังสถานีทํางานที่ตรงกัน
แบ่งปัน
1). หลังจากการโครงการ:
ความต้องการของลูกค้า:
ระบุและแยกถังขนาดต่างๆ
ปัญหาของลูกค้า:
1. การระบุกล่องที่มีขนาดแตกต่างกันตามตำแหน่งและขนาดของกล่องเพื่อส่งออกทิศทางการหยิบที่เหมาะสม
2. การเปลี่ยนแปลงของแสงในแต่ละช่วงเวลาจากเช้าถึงเย็น (แดดหรือเมฆ) ส่งผลให้อัตราการรู้จำและการเสถียรของระบบต้องได้รับการปรับปรุง
2). สถาปัตยกรรมของการแก้ปัญหา:
กระบวนการโดยรวม:

โมดูลกระบวนการสำคัญ:
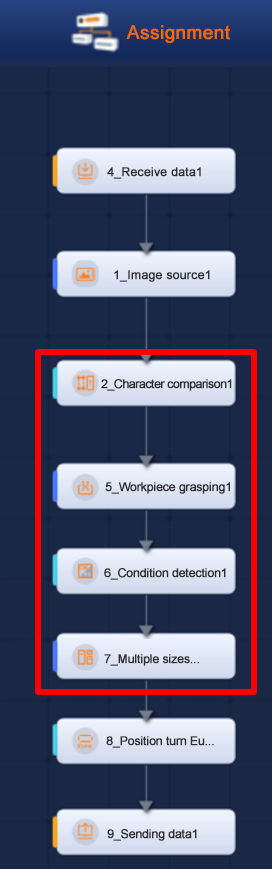
การเปรียบเทียบตัวอักษร: กำหนดคำสั่งที่ตรงกันซึ่งใช้ในการกระตุ้นตรรกะเพื่อตรวจจับโมดูลถัดไป
การหยิบชิ้นงาน: เขียนพื้นที่ของภาพ RGB ที่จะหยิบชิ้นงาน โดยขอบเขตของการเลือกกล่องควรเกินขอบนอกของกรอบจริง
การตรวจสอบเงื่อนไข: กำหนดว่าผลิตภัณฑ์ถูกจำแนกหรือไม่ และส่งสัญญาณตรรกะ OK/NG ที่สอดคล้องกันไปยังคอมพิวเตอร์หลัก
กล่องหลายขนาด: กำหนดค่าพารามิเตอร์ที่เกี่ยวข้องของประเภทการวางพาเลทกล่องในหลากหลายขนาดและดำเนินการงานการแยกพาเลท โดยใช้ตัวอย่างเพื่อแบ่งโมเดลGORITHM รวมถึงรวบรวมภาพในตำแหน่งการวางผลิตภัณฑ์หลากหลายสำหรับการฝึกฝนโมเดล
2). ข้อดีของโปรแกรม:
1. ในกรณีที่มีการเปลี่ยนแปลงความเข้มแสงมาก ภาพสามารถชัดเจนและมีความเสถียรในการจำแนก และเวลาจากสัญญาณที่ได้รับจนถึงการส่งออกข้อมูลคือ 3.5 วินาที
2. สำหรับกล่องวัสดุที่มีขนาดและสีสันหลากหลาย สามารถบรรลุอัตราการจำแนก 100%
3. เพื่อให้การผลิตไม่หยุดตลอด 24 ชั่วโมง ประสิทธิภาพของกำลังการผลิตเพิ่มขึ้น 100%
4. สถานีทำงานด้วยมือแบบ 3D-RGBD สามารถแทนที่แรงงานคนได้ 5 คน









