Pagina principale > Soluzioni > Semiconduttori/circuiti integrati
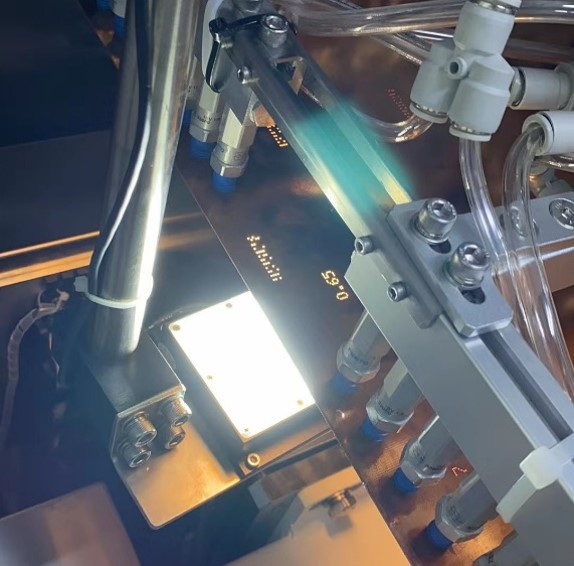
Nella parte di controllo della qualità di questo progetto, la tensione viene misurata utilizzando due sonde per puntare rispettivamente le due estremità delle giunzioni di saldatura, in modo da giudicare se le giunzioni di saldatura sulla scheda PCB sono in buon contatto ed eliminare i prodotti problematici.
Condividere
1). Contesto del progetto:
Descrizione del requisito:
Prima, la scheda PCB viene fotografata dalla telecamera superiore e vengono fornite le coordinate delle giunzioni da misurare per un posizionamento approssimativo. Successivamente, i due manipolatori portano rispettivamente un sonda alle coordinate corrispondenti per fotografare la giunzione, eseguire il posizionamento preciso e poi toccare insieme la giunzione per misurare il voltaggio e determinare se la giunzione è buona.
Punti di dolore e problemi:
1.Utilizzando lo schema tradizionale, l'intero set di telecamera, obiettivo, sorgente luminosa, controller della sorgente luminosa e altri costi sono più elevati.
2.Lo schema tradizionale ha un processo complesso, richiede competenze elevate per il personale di debug sul campo e comporta costi del lavoro elevati.
3.Lo schema tradizionale ha un periodo di debug lungo e non può essere lanciato rapidamente.
2). Architettura della soluzione:
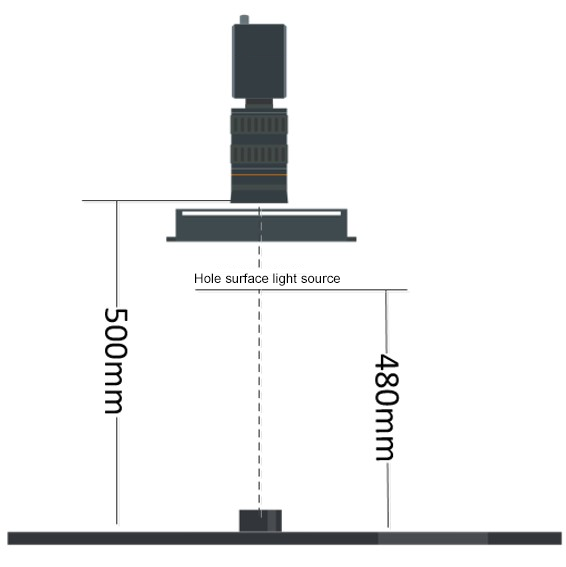
Diagramma di erezione:
Processo di debug:
1. Il manipolatore trasporta il foglio di calibrazione e mantiene la stessa altezza con la scheda PCB. Scatta foto con la telecamera, costruisce il processo con VM, riceve le coordinate fisiche del manipolatore tramite il protocollo di comunicazione TCP e esegue la calibrazione automatica a nove punti.
2. Il braccio robotico trasporta una telecamera intelligente per fotografare la scheda di calibrazione, eseguire il timbratura e generare file di calibrazione attraverso le immagini e le coordinate fisiche dei nove punti.
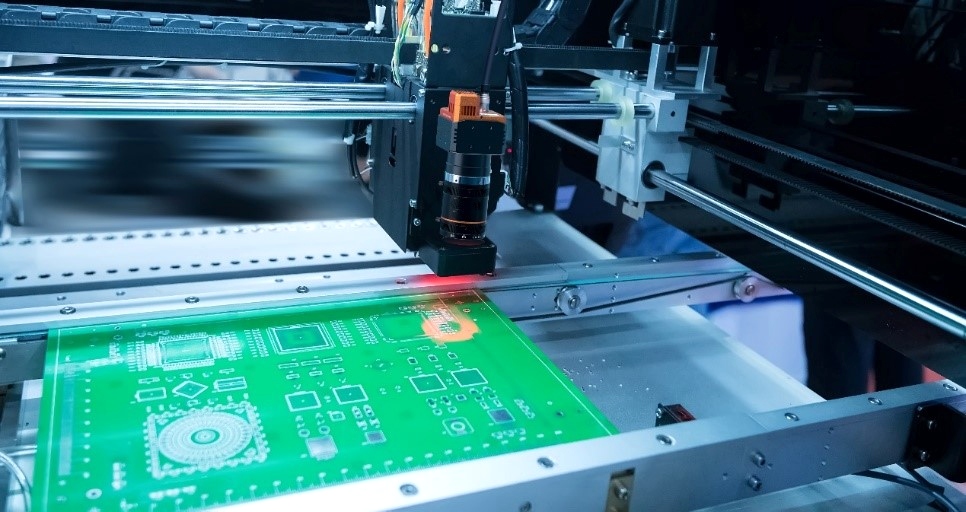
3. La posizione della scheda PCB viene inviata al braccio robotico, e il braccio robotico trasporta la telecamera intelligente alla posizione corrispondente per fotografare la giunzione saldata.
4. La telecamera intelligente utilizza la ricerca puntuale per inquadrare ciascuna posizione della giunzione saldata in ordine, calibrare le coordinate e convertirle per raggiungere l'ordinamento.
5. Dopo aver fatto la differenza tra la posizione della fotografia di calibrazione della telecamera intelligente e la posizione della fotografia di produzione, aggiungi il valore di conversione della calibrazione della giunzione saldata per ottenere la posizione effettiva di ciascuna giunzione saldata.
3). Vantaggi del programma:
1. Usare una fotocamera superiore per scattare foto delle coordinate dei manipolatori su entrambi i lati direttamente, e i due manipolatori raggiungono il punto di destinazione dopo aver preso le foto attraverso calibrazione e trasformazione, senza bisogno di andarci uno alla volta, il che risparmia molto tempo di movimento del manipolatore. Il processo complessivo è stato ridotto da 15 secondi a circa 5 secondi.
2. Riducendo il rettangolo di ricerca della giunzione saldata e posizionando ciascuna giunzione individualmente, è possibile posizionarla correttamente sulla giunzione saldata. I clienti richiedono un'accuratezza di 0,1 mm, e l'accuratezza attuale raggiunge 0,05 mm per soddisfare i requisiti dei clienti.
3. questo progetto è un progetto classico in cui vengono utilizzate insieme la telecamera intelligente e la telecamera industriale. Nel progetto reale, si può scegliere il tipo appropriato di telecamera in base alle esigenze reali, e persino usarle insieme per adattarsi all'ambiente del cliente e ottenere l'effetto corrispondente.
4. Il piano originale del cliente prevedeva di inviare le coordinate alla posizione corrispondente della telecamera superiore dopo aver scattato la prima foto, e di inviare le coordinate per la seconda foto dopo aver scattato la seconda immagine. Nel piano attuale è sufficiente scattare una sola foto e richiamare file di calibrazione diversi per controllare contemporaneamente il braccio robotico 1 e 2, aumentando l'efficienza complessiva del 20%.