1). หลังจากการโครงการ:
คำอธิบายความต้องการ:
ขั้นแรก บอร์ด PCB จะถูกถ่ายภาพโดยกล้องด้านบน และให้พิกัดของจุดเชื่อมที่ต้องการวัดสำหรับการวางตำแหน่งคร่าวๆ จากนั้นแขนกลสองตัวจะนำ_probe_ไปยังพิกัดที่เกี่ยวข้องเพื่อถ่ายภาพจุดเชื่อม ทำการวางตำแหน่งอย่างแม่นยำ จากนั้นจึงเจาะจุดเชื่อมพร้อมกันเพื่อวัดแรงดันไฟฟ้าและตรวจสอบว่าจุดเชื่อมดีหรือไม่
จุดปัญหาและความท้าทาย:
1. การใช้วิธีแบบเดิม ค่าใช้จ่ายของกล้อง เลนส์ แหล่งกำเนิดแสง คอนโทรลเลอร์ของแหล่งกำเนิดแสง และอื่นๆ จะสูง
2. วิธีการแบบเดิมมีกระบวนการซับซ้อน มีความต้องการสูงสำหรับเจ้าหน้าที่ปรับแต่งในสถานที่ และมีต้นทุนแรงงานสูง
3. วิธีการแบบเดิมมีระยะเวลาในการปรับแต่งนานและไม่สามารถเปิดตัวได้อย่างรวดเร็ว
2). สถาปัตยกรรมของโซลูชัน:
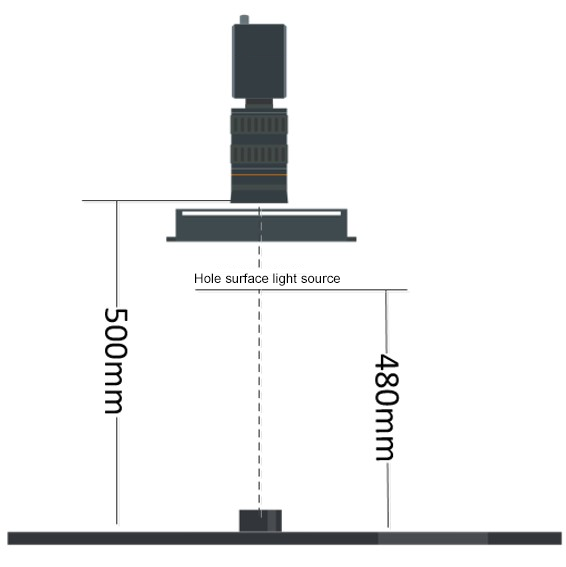
แผนผังการติดตั้ง:
กระบวนการปรับแต่ง:
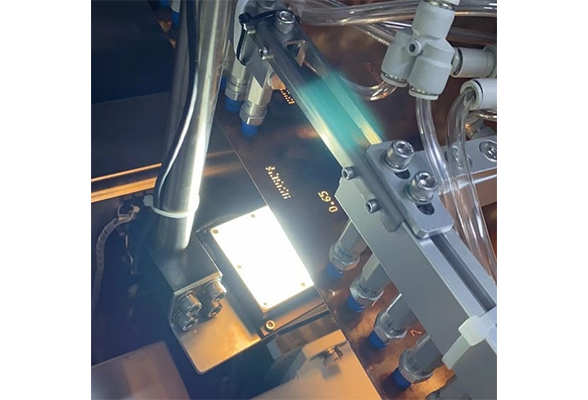
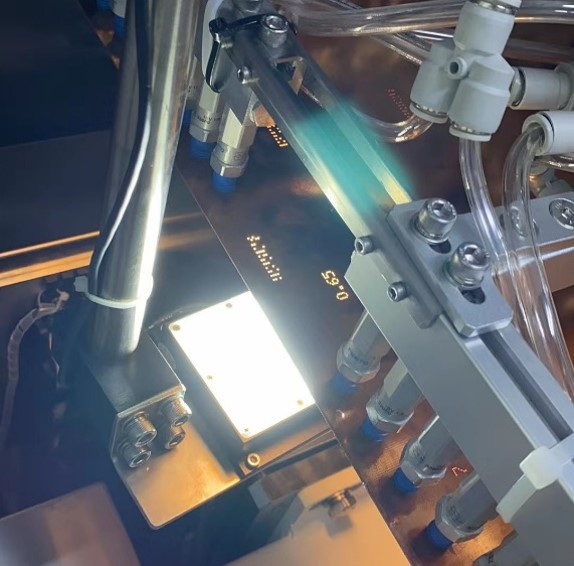
1. อุปกรณ์ควบคุมถือแผ่นการสอบเทียบและรักษาความสูงเดียวกับกระดาน PCB ถ่ายภาพด้วยกล้อง สร้างกระบวนการด้วย VM รับพิกัดทางกายภาพของอุปกรณ์ควบคุมผ่านโปรโตคอลการสื่อสาร TCP และดำเนินการสอบเทียบอัตโนมัติเก้าจุด
2. แขนหุ่นยนต์ถือกล้องอัจฉริยะเพื่อถ่ายภาพแผ่นสอบเทียบ ทำการประทับจุด และสร้างไฟล์สอบเทียบผ่านภาพและพิกัดทางกายภาพของเก้าจุด
3. ตำแหน่งของกระดาน PCB จะถูกส่งไปยังแขนหุ่นยนต์ และแขนหุ่นยนต์จะนำกล้องอัจฉริยะไปยังตำแหน่งที่กำหนดเพื่อถ่ายภาพข้อต่อ땜
4. กล้องอัจฉริยะใช้วิธีการค้นหาจุดเพื่อกำหนดตำแหน่งแต่ละข้อต่อในลำดับ สอบเทียบพิกัดและแปลงเพื่อให้เกิดการเรียงลำดับ
5. หลังจากคำนวณความแตกต่างระหว่างตำแหน่งภาพสอบเทียบของกล้องอัจฉริยะกับตำแหน่งภาพการผลิต ให้เพิ่มค่าการแปลงการสอบเทียบของข้อต่อเพื่อหาตำแหน่งจริงของแต่ละข้อต่อ
3). ข้อดีของโปรแกรม:
1. ใช้กล้องด้านบนในการถ่ายภาพพิกัดของตัวจับทั้งสองข้างโดยตรง และตัวจับทั้งสองจะไปยังจุดเป้าหมายได้โดยตรงหลังจากการถ่ายภาพผ่านการาลิเบรตและการแปลง โดยไม่จำเป็นต้องไปทีละขั้นตอน ซึ่งช่วยประหยัดเวลาในการเคลื่อนที่ของตัวจับอย่างมาก กระบวนการทั้งหมดลดลงจาก 15 วินาทีเหลือประมาณ 5 วินาที
2. โดยการลดกรอบสี่เหลี่ยมสำหรับการค้นหาจุดเชื่อมและระบุตำแหน่งแต่ละจุดเชื่อมแยกกัน สามารถระบุตำแหน่งได้อย่างแม่นยำถึงจุดเชื่อม ลูกค้าต้องการความแม่นยำที่ 0.1 มม. และในปัจจุบันความแม่นยำถึง 0.05 มม. ซึ่งตอบสนองความต้องการของลูกค้า
3. โครงการนี้เป็นตัวอย่างของการใช้งานกล้องอัจฉริยะและกล้องอุตสาหกรรมร่วมกัน ในโครงการจริงสามารถเลือกประเภทกล้องที่เหมาะสมตามความต้องการเฉพาะของลูกค้า หรือแม้กระทั่งใช้ทั้งสองแบบร่วมกันเพื่อปรับให้เข้ากับสภาพแวดล้อมของลูกค้าและบรรลุผลลัพธ์ที่ต้องการ
4. แผนเดิมของลูกค้าคือการส่งพิกัดไปยังตำแหน่งที่เกี่ยวข้องของกล้องบนหลังจากถ่ายรูปแรก และส่งพิกัดไปยังรูปที่สองหลังจากถ่ายรูปครั้งที่สอง ในขณะที่แผนปัจจุบันเพียงแค่ต้องถ่ายรูปครั้งเดียวและเรียกใช้ไฟล์าลิเบรชันต่างๆ เพื่อควบคุมแขนหุ่นยนต์ 1 และ 2 พร้อมกัน และประสิทธิภาพโดยรวมได้เพิ่มขึ้น 20%