1) Hậu quả dự án:
Mô tả yêu cầu:
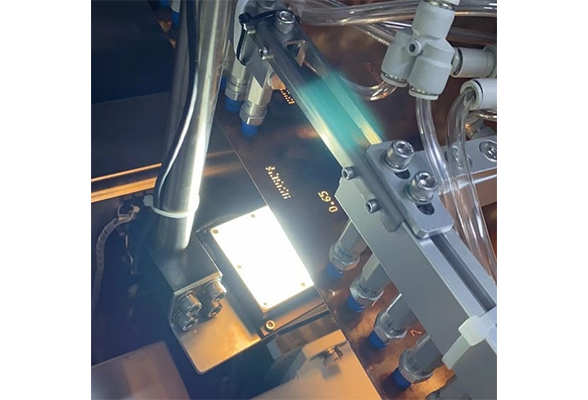
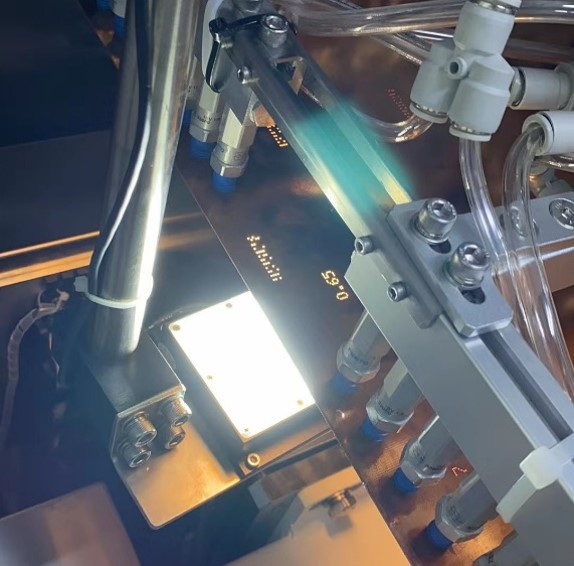
Trước tiên, bảng PCB được chụp ảnh bởi camera trên cùng, và tọa độ của các mối hàn cần đo được cung cấp cho việc định vị thô. Sau đó, hai manipulator lần lượt mang một đầu dò đến tọa độ tương ứng để chụp ảnh mối hàn, thực hiện định vị chính xác, sau đó cùng nhau chạm vào mối hàn để đo điện áp và xác định xem mối hàn có tốt hay không.
Điểm đau và vấn đề:
1.Sử dụng phương án truyền thống, toàn bộ chi phí cho camera, ống kính, nguồn sáng, bộ điều khiển nguồn sáng và các chi phí khác cao hơn.
2.Phương án truyền thống có quy trình phức tạp, yêu cầu cao đối với nhân viên điều chỉnh tại hiện trường, và chi phí lao động cao.
3.Phương án truyền thống có thời gian điều chỉnh dài và không thể ra mắt nhanh chóng.
2). Kiến trúc giải pháp:
Bản đồ dựng:
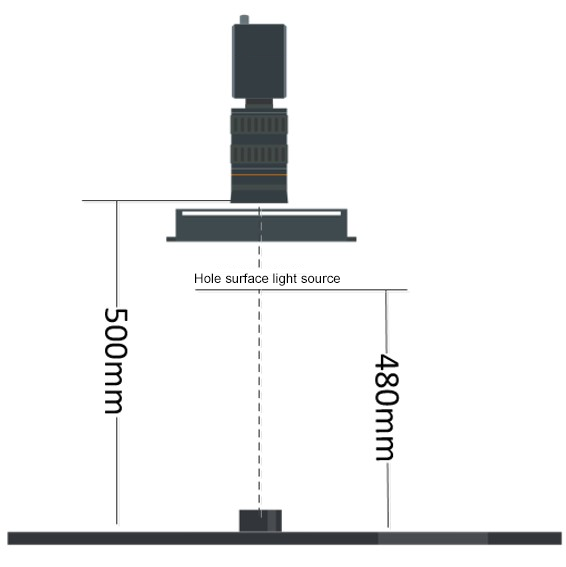
Quy trình điều chỉnh:
1. Bộ thao tác cầm tờ hiệu chuẩn và giữ cùng độ cao với bảng PCB. Chụp ảnh bằng camera, xây dựng quy trình với VM, nhận tọa độ vật lý của bộ thao tác thông qua giao thức truyền thông TCP, và thực hiện hiệu chuẩn tự động chín điểm.
2. Tay robot mang theo một camera thông minh để chụp bảng hiệu chuẩn, thực hiện đóng dấu điểm và tạo ra các tập tin hiệu chuẩn thông qua hình ảnh và tọa độ vật lý của chín điểm.
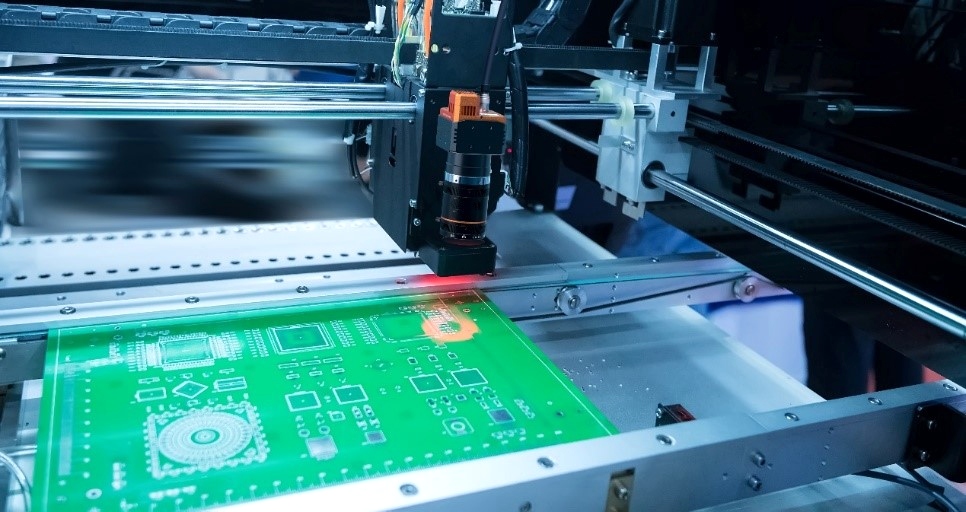
3. Vị trí của bảng PCB được gửi đến tay robot, và tay robot mang camera thông minh đến vị trí tương ứng để chụp hình mối hàn.
4. Camera thông minh sử dụng tìm kiếm điểm để khung từng vị trí mối hàn theo thứ tự, hiệu chỉnh tọa độ và chuyển đổi chúng để đạt được sắp xếp.
5. Sau khi xác định sự khác biệt giữa vị trí chụp ảnh hiệu chuẩn của camera thông minh và vị trí chụp ảnh sản xuất, thêm giá trị chuyển đổi hiệu chuẩn mối hàn để lấy được vị trí thực tế của mỗi mối hàn.
3). Ưu điểm của chương trình:
1. Sử dụng camera trên để chụp ảnh tọa độ của các thao tác cơ bên trái và bên phải trực tiếp, sau khi chụp ảnh, hai thao tác cơ sẽ đạt đến điểm mục tiêu sau khi hiệu chỉnh và chuyển đổi, không cần phải di chuyển lần lượt, điều này tiết kiệm đáng kể thời gian di chuyển của thao tác cơ. Toàn bộ quá trình đã được giảm từ 15 giây xuống còn khoảng 5 giây.
2. Bằng cách giảm kích thước hộp chữ nhật tìm mối hàn và định vị từng mối hàn riêng lẻ, có thể định vị chính xác vị trí của mối hàn. Khách hàng yêu cầu độ chính xác là 0,1mm, và độ chính xác hiện tại đạt 0,05mm để đáp ứng nhu cầu của khách hàng.
3. Dự án này là một ví dụ điển hình về việc sử dụng cả camera thông minh và camera công nghiệp cùng lúc. Trong dự án thực tế, có thể chọn loại camera phù hợp tùy theo nhu cầu thực tế, thậm chí có thể sử dụng cả hai để thích nghi với môi trường của khách hàng, nhằm đạt được hiệu quả tương ứng.
Kế hoạch ban đầu của khách hàng là gửi tọa độ đến vị trí tương ứng của camera trên sau khi chụp bức ảnh đầu tiên, và gửi tọa độ cho bức ảnh thứ hai sau khi chụp xong. Kế hoạch hiện tại chỉ cần chụp một lần và gọi các tệp hiệu chỉnh khác nhau để điều khiển cánh tay robot 1 và 2 cùng lúc, và hiệu suất tổng thể đã được tăng lên 20%.